
Воспроизводится по:
"Первые панорамы лунной поверхности" т.2, М., "Наука", 1969 (без указания авторов)
Проблема определения прочности и плотности лунных грунтов уже много лет привлекает к себе внимание ученых и конструкторов космических кораблей.
Но все сведения о поверхностных слоях Луны до недавнего времени получали только косвенными методами - астрономическими и радиофизическими.
Первые прямые сведения о прочности лунного грунта и структуре его поверхности были получены в результате мягкой посадки станции "Луна-9". Однако на этой станции специальных приборов для изучения механических свойств грунта не было. Впервые такая аппаратура была применена на станции "Луна-13". Исследование грунтов станцией "Луна-13" производилось тремя приборами:
Главная задача эксперимента состояла в том, чтобы определить по показаниям приборов, к какой категории относится материал поверхностного слоя Луны (скала, пористая минеральная масса, зернистый грунт или пыль), и установить в первом приближении его плотность и механические параметры.
В связи с этим в процессе конструктивной разработки, радиационного плотномера и грунтомора-пенетрометра проведены многочисленные тарировки их на земных грунтах и моделирующих материалах и определены физические и механические свойства этих материалов стандартными способами, принятыми в механике грунтов. Тарировки проводились при нормальном атмосферном давлении и в вакууме, при нормальном ускорении силы тяжести gЗ ~ 9,81 м/сек2 и в самолете, летящем по траектории, на которой gЛ ~ 1,63 м/сек2, при статических и динамических нагрузках на пенетрометре, на материалах с ровной и неровной поверхностью.
Эксперименты по определению механических свойств грунта на автоматической станции "Луна-13" знаменуют собой начало нового этапа изучения Луны с помощью приборов инженерно-геологической разведки, впервые доставленных на ее поверхность.
Грунтомер-пенетрометр предназначен для оценки механической прочности самого верхнего слоя лунного грунта. Он состоит (рис. 1) из пластмассового корпуса, нижняя часть которого образует кольцевой штамп с наружным диаметром 12 см и внутренним - 7,15 см, ииндентора с конической нижней частью. Корпус изготовлен из стеклопластика, индентор - из титана. Угол заострения конуса индентора 103°, максимальный диаметр конуса 3,5 см. Индентор может быть выдвинут из корпуса вниз на расстояние 5 см.
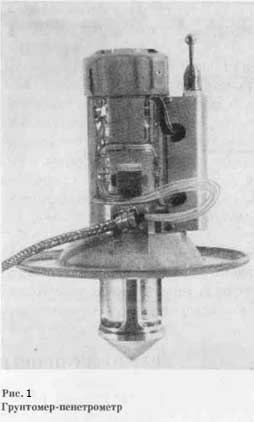
На корпусе прибора укреплен потенциометр со скользящим контактом. Последний жестко соединен с выступом индентора. Поэтому при перемещении индентора меняются соотношение плеч потенциометра и напряжение на его выходных контактах.
Индентор служит одновременно корпусом реактивного двигателя твердого топлива с соплом, обращенным вверх. Непосредственно за срезом сопла размещено электропиротехническое устройство запуска двигателя, которое после срабатывания двигателя отбрасывается давлением пороховых газов. Команда на запуск подается после раскрытия лепестковых антенн АЛС и выноса прибора на поверхность Луны. Предварительно производится опрос прибора телеметрической системой для получения нулевого отсчета.
Оценка механических свойств грунта с помощью грунтомера-пенетрометра производится после выноса прибора на поверхность грунта и окончания работы его реактивного двигателя по глубине погружения индентора, а в рыхлых и пылевидных грунтах также и по глубине погружения кольцевого штампа корпуса прибора.
При запуске двигателя вместе с пусковым устройством отбрасывается крышка корпуса. При этом перерезаются провода электроцепей пускового устройства, освобождается шариковый замок, связывающий индентор с корпусом прибора, и индентор получает возможность свободного перемещения вниз под действием тяги двигателя на расстояние до 5,0 см.
Глубина погружения регистрируется потенциометром. Продолжительность действия двигателя равна 0,6-1,0 сек., средняя сила тяги в земных условиях 5-7 кг и в вакууме 25-37 мм рт. ст.- 5,5-7,5 кг. Точность измерения перемещения индентора около 0,3 мм.
Как показал опыт, внедрение индентора в сыпучие и твердые пористые материалы происходит очень быстро (0,003-0,05 сек.) и в дальнейшем, при продолжающейся работе двигателя, прироста погружения индентора не наблюдается. В связном материале, наоборот, процесс внедрения затягивается более чем на 0,5 сек., хотя и в этом случае главная часть деформации происходит в самом начале. После прекращения работы двигателя индентор остается в положении, достигнутом к этому моменту. Очередной опрос прибора телеметрической системой позволяет сразу же определить глубину его погружения, а последующие опросы дают возможность проследить за изменениями этой величины с течением времени.
В очень рыхлых и пылевидных грунтах индентор погружается на предельную глубину в 5 см, после чего его выступ, связанный с движком потенциометра, упирается в конец прорези корпуса и начинает передавать на него нагрузку от продолжающего работать двигателя. Вследствие этого начинается погружение в грунт кольцевого штампа, которым служит нижняя часть прибора.
О глубине этого погружения можно судить по телевизионному изображению в случае, если прибор попадает в поле зрения камеры. В твердых пористых, пенистых и связных зернистых грунтах этого не наблюдается.
При выборе размеров конуса индентора принималось, что наибольшая величина зерен грунта измеряется миллиметрами. На основании специально проведенных опытов было установлено, что для такого грунта минимальный разброс экспериментальных данных достигается при использовании конуса диаметром от 30 до 40 мм. Первоначально угол заострения конуса был принят равным 150°, но впоследствии, для увеличения точности измерений при работе на твердых пористых материалах, он был уменьшен до 103°.
Исходя из необходимости исследования широкого диапазона грунтов и горных пород, расчетное усилие пенетрометра было выбрано таким, чтобы его конус мог заметно погружаться в большинство рыхлых и пористых пород, присутствие которых можно ожидать в поверхностных слоях Луны.
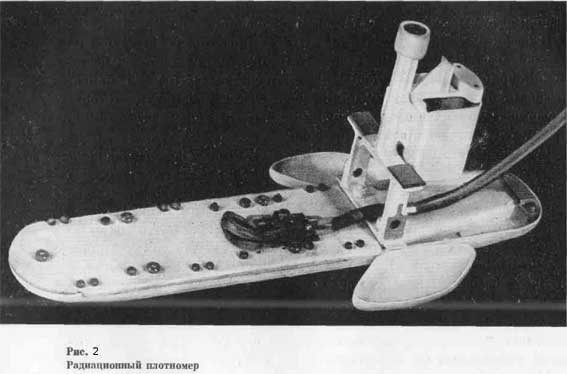
Радиационный плотномер предназначен для определения плотности верхнего слоя лунного грунта толщиной в среднем до 15 см. Он состоит из датчика, укрепленного на выносном механизме и прикладываемого непосредственно к поверхности грунта, и электронного блока, обрабатывающего информацию от датчика и передающего ее телеметрической системе. Электронный блок находится в герметичном корпусе АЛС.
На рис. 2 приведена фотография датчика, а на рис. 3 дано его изображение, переданное с Луны.
|
|
|
Датчик радиационного плотномера состоит из продолговатого плоского корпуса размерами в плане 25,8x4,8 см и высотой 1 см с двумя боковыми сегментами, обеспечивающими его устойчивость на неровной поверхности. На корпусе укреплена надстройка, служащая для соединения датчика с выносным механизмом. Внутри корпуса помещены радиоактивный изотоп Cs137 активностью в 1 мг экв. радия, свинцовый экран и три группы счетчиков типа СБМ-10М для регистрации рассеянного гамма-излучения. К датчику присоединен кабель, подающий питание на аноды счетчиков и связывающий его с электронным блоком.
Принцип действия радиационного плотномера следующий: гамма-кванты, излучаемые изотопом, попадают внутрь грунта, на поверхности которого установлен датчик. В результате эффектов рассеивания и поглощения некоторая часть гамма-квантов поглощается грунтом, а другая возвращается к поверхности грунта и может быть зарегистрирована счетчиками.
Для того чтобы гамма-излучение изотопа не попадало непосредственно на счетчики, минуя грунт, между изотопом и счетчиками помещен упомянутый выше свинцовый экран.
Электронный блок состоит из трёх одинаковых каналов, соответствующих трем группам счетчиков. Он регистрирует количество импульсов, поступающих от счетчиков, и суммирует их по каждой из трех групп на протяжении 2 мин., протекающих между очередными опросами телеметрической системы.
Динамограф предназначен для исследования динамики соударения АЛС с поверхностью Луны при посадке. Он регистрирует длительность и величину динамической перегрузки и представляет собой систему из трех акселерометров, ориентированных в трех взаимно перпендикулярных направлениях. Динамограф укреплен на приборной раме внутри АЛС, Сигналы акселерометров поступали на интегрирующее и запоминающее устройство, информация с которого передавалась телеметрической системой на Землю.
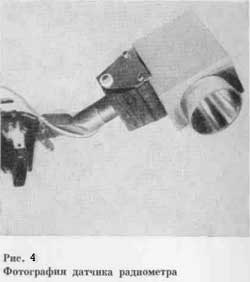
Радиометр измерял тепловой поток, излучаемый лунной поверхностью. Прибор имел четыре одинаковых датчика, размещенных так, чтобы при любом возможном расположении станции относительно Солнца по крайней мере у одного из них в поле зрения не попадали бы ни тень станции, ни небо и чтобы его выходное отверстие не засвечивалось солнечными лучами. Фотография и схема датчиков показаны на рис. 4 и 5.
 |
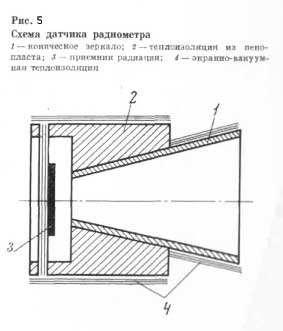 |
Поле зрения датчика ограничено коническим зеркалом с углом раствора 28°. Зеркалом служит усеченный металлический конус высотой 60 мм и диаметром узкой части 15 мм, отполированный изнутри. Узким своим концом конус прикреплен к прямоугольной камере, внутри которой находится приемник излучения. Как камера приемника, так и коническое зеркало снаружи теплоизолированы двадцатью слоями экранно-вакуумной изоляции.
Датчики расположены снаружи и укреплены на шарнирных нетеплопроводных кронштейнах. Во время полета кронштейны сложены и датчики находятся в зазоре между оболочкой станции и лепестковыми антеннами. При раскрытии антенн кронштейны выпрямляются и датчики занимают свои нормальные положения.
Приемником служит тонкая пластина размером 15x20 мм с наклеенной на нее тонкой металлической спиралью, электрическое сопротивление которой и является мерой температуры. Приемник окрашен эмалевой краской, хорошо поглощающей инфракрасное излучение (от 75 до 85% в зависимости от длины волны) и отражающей до 80% видимого света.
Приемник не соприкасается с корпусом датчика, а хорошо теплоизолирован от него с помощью экранно-вакуумной изоляции. Благодаря этому датчики имеют как бы две постоянные времени: несколько минут для изменения температуры самого приемника и несколько часов для изменения температуры внутренних стенок камеры приемника, с которыми приемник находится в лучистом теплообмене.
Датчики калибровались по излучению имитатора абсолютно черного тела с излучательной способностью е≈0,997. При калибровке датчики крепились в вакуумной камере на таких же кронштейнах, которые были использованы в АЛС. Давление в камере при калибровках было около 10-4 мм рт. ст.
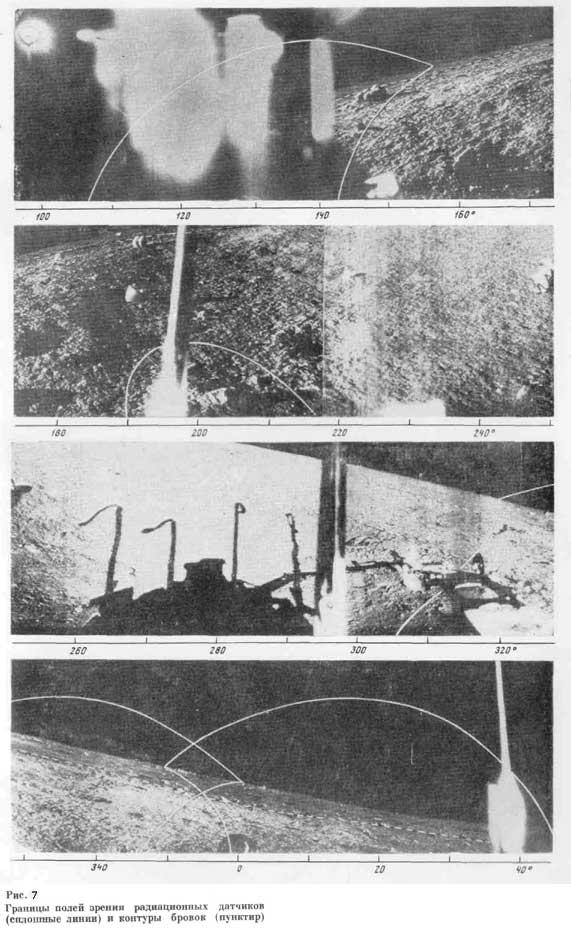
Рис. 8 представляет собой проекцию расположения датчиков на плоскость панорамирования, т. е. на плоскость, перпендикулярную к оси, относительно которой велось сканирование лунного ландшафта. Оси чувствительных элементов были наклонены на 30° ниже плоскости панорамирования.
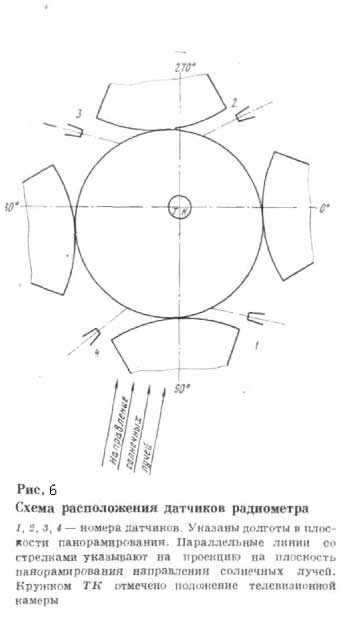
Диаметр поля зрения каждого чувствительного элемента составил около 70°. Поля зрения чувствительных элементов ограничены на панораме (рис. 7) белыми линиями. На фоне неба эти линии являются дугами окружностей с диаметром, эквивалентным угловому размеру поля зрения на бесконечности. На лунной поверхности области, находящиеся в поле зрения чувствительных элементов, ограничены сложными кривыми, конфигурация которых определяется различием в расстояниях элементов поверхности от чувствительных элементов и зрачка телевизионной камеры. Пятно в левом верхнем углу панорамы при угле γ≈100° является изображением Солнца, а яркие пятна в области γ=105÷140° солнечные блики на деталях станции.
При малых высотах Солнца над лунным горизонтом часть внутренней поверхности конических зеркал чувствительных элементов 1 и 4 (рис. 8), направленных в сторону Солнца, засвечивается прямым солнечным светом. В конусы элементов 2 и 3 прямой солнечный свет не попадал, но часть поля зрения чувствительного элемента занимала тень станции.
Часть поля зрения элементов 1, 2, 4 была занята небом. Таким образом, показания чувствительного элемента 3 являются наиболее приемлемыми для интерпретации.